
What is called Velocity Ratio?
वेलॉसिटी रेसिओ क्या होता है?
एक सरल मशीन ( simple machine ) में प्रयास ( effort ) के द्वारा तय की गई दूरी और लोड ( load ) के द्वारा तय की गई दूरी के अनुपात को वेलॉसिटी रेसिओ ( velocity ratio ) कहा जाता है।
इसलिए, वेलॉसिटी रेसिओ \quad VR = \left ( \frac {\text {प्रयास के द्वारा तय की गयी दूरी}}{\text {लोड के द्वारा तय की गयी दूरी}} \right )
किसी मशीन ( machine ) में, लोड के द्वारा तय की गई दूरी और प्रयास के द्वारा तय की गई दूरी स्वतंत्र नहीं होते हैं। ये मशीन के डिजाइन मापदंडों ( design parameters ) पर निर्भर करते हैं। अतः, एक सरल मशीन का वेलॉसिटी रेसिओ, मशीन पैरामीटर्स ( machine parameters ) पर निर्भर करता है।
Machine parameters
मशीन पैरामीटर्स
मशीन के प्रयोग से, कम प्रयास लगाकर एक बड़ा कार्य किया जाता है। किसी मशीन के आतंरिक संरचना ( internal configuration ), मशीन के कार्य दक्षता ( efficiency ) और प्रदर्शन ( performance ) दोनों को प्रभावित करते हैं। मशीन के प्रदर्शन और दक्षता को प्रभावित करने वाले आयाम ( dimension )और विन्यास ( configuration ) को मशीन पैरामीटर ( machine parameters ) कहते हैं।
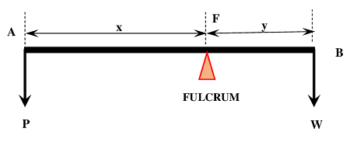
चित्र में दिखाए गए एक सीधे उत्तोलक ( straight lever ) पर विचार करें जिससे मशीन पैरामीटर को स्पष्ट रूप से समझा जा सकता है।
Fulcrum point
फल्क्रम पॉइंट
किसी lever का वह स्थिर बिंदु, जिसपर वह किसी भी दिशा में घूमने में समर्थ होता है, उसे fulcrum point कहा जाता है।
- किसी उत्तोलक के लिए यह बिंदु बहुत महत्वपूर्ण होता है।
- कार्य के दौरान उत्तोलक का फल्क्रम पॉइंट अपना स्थान नहीं बदलता है।
- चित्र में बिंदु ( F ) , उत्तोलक का फल्क्रम पॉइंट है।
Load
लोड
उत्तोलक ( lever ) के लोड ( load ) को इस प्रकार से परिभाषित किया जाता है –
- एक बल, जिसे उत्तोलक द्वारा निपटाया जा रहा हो।
- एक भार, जिसे उत्तोलक द्वारा उठाया जा रहा हो।
- एक कार्य, जिसे उत्तोलक द्वारा किया जा रहा हो।
Load point
लोड पॉइंट
उत्तोलक ( lever ) का वह बिंदु जिस पर भार ( load ) को उठाया जाता है या जहाँ से कार्य आउट पुट के रूप में प्राप्त होता है, उसे लोड पॉइंट ( load point ) कहा जाता है।
चित्र में बिंदु ( B ) , उत्तोलक का लोड पॉइंट है।
Load arm
लोड भुजा
एक सीधे उत्तोलक ( straight lever ) की लंबाई को फल्क्रम पॉइंट की स्थिति से दो भागों में विभाजित किया जा सकता है। जैसे –
- लोड भुजा ( load arm )।
- प्रयास भुजा ( effort arm )।
लम्बाई के एक भाग को, लोड भुजा ( load arm ) कहते हैं। इसे लोड आउट-पुट या कार्य आउट-पुट के साथ जोड़ा जाता है।
चित्र में ( BF ) लोड भुजा है।
इसलिए लोड भुजा, लोड पॉइंट ( B ) और फल्क्रम पॉइंट ( F ) के बीच की दूरी होती है।
Effort
प्रयास
प्रयास ( Effort ) को इस प्रकार से परिभाषित किया जाता है –
- एक बल, जो उत्तोलक में इनपुट के रूप में लगाया जाता है।
- एक कार्य, जो उत्तोलक में इनपुट कार्य के रूप में डाला जाता है।
Effort point
प्रयास पॉइंट
उत्तोलक के जिस बिंदु पर इनपुट बल या प्रयास को लगाया जाता है, उसे प्रयास बिंदु ( effort point ) कहा जाता है।
चित्र में बिंदु ( A ) , उत्तोलक का प्रयास बिंदु है।
Effort arm
प्रयास भुजा
Lever की लम्बाई का दूसरा भाग जो प्रयास से जुड़ा होता है, उसे प्रयास भुजा ( effort arm ) कहा जाता है।
चित्र में ( AF ) प्रयास भुजा है।
अतः प्रयास भुजा, प्रयास बिंदु ( A ) और फल्क्रम ( F ) के बीच की दूरी होती है।
Velocity of load point & effort point
लोड और प्रयास का वेग
जब मशीन काम करती है तब लोड पॉइंट और प्रयास पॉइंट, दोनों समय के साथ गति करते हैं और अपनी स्थिति बदलते हैं। इसलिए, इन बिंदुओं का एक निश्चित वेग होता है।
एक निश्चित समय में लोड पॉइंट के द्वारा तय की गई दूरी को लोड पॉइंट का वेग ( velocity of load point ) कहा जाता है। इसी तरह उसी समय में, प्रयास पॉइंट के द्वारा तय की गई दूरी को प्रयास पॉइंट का वेग ( velocity of effort point ) कहा जाता है।
प्रयास पॉइंट के वेग और लोड पॉइंट के वेग के अनुपात को, वेलॉसिटी रेसिओ ( velocity ratio ) कहा जाता है।
इसलिए, एक मशीन का velocity ratio इस प्रकार भी व्यक्त किया जा सकता है –
VR = \left ( \frac {\text {प्रयास पॉइंट का वेग}}{\text {लोड पॉइंट का वेग}} \right )
Velocity Ratio of Wedge
पच्चर का वेलॉसिटी रेसिओ
एक पच्चर में दो झुके हुए तल होते हैं जो आगे चलकर मिलते हैं और एक तेज धार बनाते हैं। इसका उपयोग, घर्षण बल का वांछित दिशा में लाभ उठाने के लिए किया जाता है।
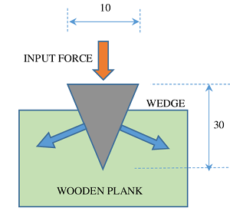
चित्र में दिखाए गए, लकड़हारे की कुल्हाड़ी पर विचार करें। जब कुल्हाड़ी के सिर पर कोई प्रयास ( effort ) लगाया जाता है, तो यह लकड़ी में गहराई तक प्रवेश करता है।
मान लें कि पच्चर के सिर की चौड़ाई ( W ) है और लंबाई ( L ) है।
तब, प्रयास द्वारा तय कि गई दूरी ( L ) होगी और लोड द्वारा तय की गई दूरी ( W ) होगी।
अत: पच्चर ( wedge ) का वेलॉसिटी रेसिओ ( velocity ratio ) होगा –
VR = \left ( \frac {\text {पच्चर की लम्बाई}}{\text {पच्चर की चौड़ाई}} \right ) = \left ( \frac {L}{W} \right )
इसलिए, चित्र में दिखाए गए पच्चर का वेलॉसिटी रेसिओ होगा –
VR = \left ( \frac {30}{10} \right ) = 3
Velocity Ratio of Inclined plane
झुके हुए तल का वेलॉसिटी रेसिओ
चित्र में दिखाए गए झुके हुए तल पर विचार करें।

चित्र से स्पष्ट है कि, जब लोड को धकेलते हुए झुके तल के ऊपरी सिरे तक पहुँचाया जाता है, तब –
प्रयास द्वारा तय की गई दूरी झुके हुए तल की तिरछी लंबाई ( Slant length ) ( L ) के बराबर होती है और लोड के द्वारा तय की गई दूरी झुके हुए तल की ऊंचाई ( Height or Rise ) ( H ) के बराबर होती है।
अत: झुके हुए तल ( inclined plane ) का वेलॉसिटी रासीओ ( velocity ratio ) होगा –
VR = \left ( \frac{\text {तल की तिरछी लंबाई}}{\text {तल की ऊंचाई}} \right ) = \left ( \frac {L}{H} \right )
Velocity Ratio of Lever
उत्तोलक का वेलॉसिटी रेसिओ
चित्र में दिखाए गए एक सीधे उत्तोलक ( straight lever ) के कार्य करने की विधि पर विचार करें।

जब उत्तोलक ( lever ) को उपयोग में लाया जाता है तब, एक निश्चित समय ( t ) में प्रयास पॉइंट ( A ) द्वारा चली दूरी ( x ) है और लोड पॉइंट ( B ) द्वारा चली दूरी ( y ) है।
अतः, प्रयास पॉइंट का वेग \left ( \frac {x}{t} \right ) होगा और लोड पॉइंट का वेग \left ( \frac {y}{t} \right ) होगा।
अतः उत्तोलक ( lever ) का वेलॉसिटी रासीओ ( velocity ratio ) होगा –
VR = \left [ \frac {( x / t )}{( y / t )} \right ] = \left ( \frac {x}{y} \right )
इसे, स्पीड रेसिओ ( Speed ratio ) या लीवरेज रेसिओ ( Leverage ratio ) भी कहा जाता है।
Velocity Ratio of Pulley
घिरनी का वेलॉसिटी रेसिओ
घिरनी ( Pulley ) या ( Sheave ) एक डिस्क जैसी वस्तु होती है जिसके रिम वाले हिस्से पर एक खांचा होता है। इस खांचे में बल या प्रयास लगाने के लिए एक लचीली रस्सी या जंजीर लपेटी जाती है।
एक, सरल घिरनी प्रणाली ( simple pulley system ) में केवल एक घिरनी ( pulley ) होती है।
इस प्रकार के प्रणाली में –
प्रयास पॉइंट के द्वारा तय दूरी = लोड पॉइंट के द्वारा तय दूरी।
अतः, एक सरल घिरनी का वेलॉसिटी रासीओ ( velocity ratio ) 1 होता है।
एक, दो घिरनी प्रणाली ( two pulley system ) में दो घिरनिया होती हैं।
इस प्रणाली में –
प्रयास पॉइंट के द्वारा तय दूरी = 2 \times लोड पॉइंट के द्वारा तय दूरी।
अतः दो घिरनी प्रणाली का वेलॉसिटी रासीओ ( velocity ratio ) ( 2 ) होता है।
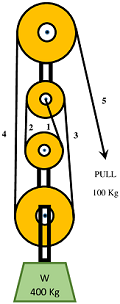
इस प्रकार, हम कह सकते है कि – “किसी घिरनी प्रणाली का वेलॉसिटी रेसिओ, उस प्रणाली में घिरनियों की संख्या के बराबर होता है।”
अतः, चित्र में दिखाए गए प्रणाली में घिरनियों की संख्या 4 है। इसलिए इसकी वेलॉसिटी रासीओ ( velocity ratio ) 4 होगी।
Velocity Ratio of Wheel & Axle

पहिया और धुरी का वेलॉसिटी रेसिओ
पहिया और धुरी ( Wheel and Axle ) उपकरण एक गोलाकार फ्रेम से बना होता है जिसे व्हील डिस्क कहा जाता है। यह एक बेलनाकार शाफ्ट या रॉड पर लगाया जाता है जिसे एक्सल कहा जाता है।
चित्र में दिखाए गए, पहिया और धुरी प्रणाली पर विचार करें। मान लें कि पहिये की गोलाई की त्रिज्या ( R ) है वहीं धुरी की त्रिज्या ( r ) है।
इस प्रणाली में पहिये ( wheel ) की रिम पर प्रयास लगाया जाता है और धुरी पर लोड उठाया जाता है या वर्क आउटपुट मिलता है। इसलिए प्रयास द्वारा तय दूरी ( R ) और लोड द्वारा तय दूरी ( r ) के अनुपातिक होगा।
अतः पहिया और धुरी ( wheel and axle ) प्रणाली का वेलॉसिटी रेसिओ ( velocity ratio ) \left ( \frac{ R }{ r } \right ) होगा।
Velocity Ratio of Screw

स्क्रू का वेलॉसिटी रेसिओ
Screw एक गोलाकार बेलनाकार वस्तु होता है जो एक कील की तरह दिखती है। मूल रूप से, यह एक गोलाकार सिलेंडर के चारों ओर लपेटा हुआ एक inclined plane है।
चित्र में दिखाए गए स्क्रू पर विचार करें।
मान लें की स्क्रू स्पिण्डल के गोलाई की त्रिज्या ( r ) है और उसके चूड़ी ( thread ) की पिच ( pitch ) या ( lead ) ( L ) है।
जब स्क्रू के सर पर प्रयास डाला जाता है, तब एक पूर्ण चक्कर में, प्रयास द्वार तय दूरी ( 2 \pi r ) होगी और इस दौरान स्क्रू ( L ) दूरी तक आगे बढ़ जाता है। अर्थात, लोड पॉइंट द्वारा तय दूरी ( L ) होगी।
अतः screw system का velocity ratio \left ( \frac{ 2 \pi r }{ L } \right ) होगा।